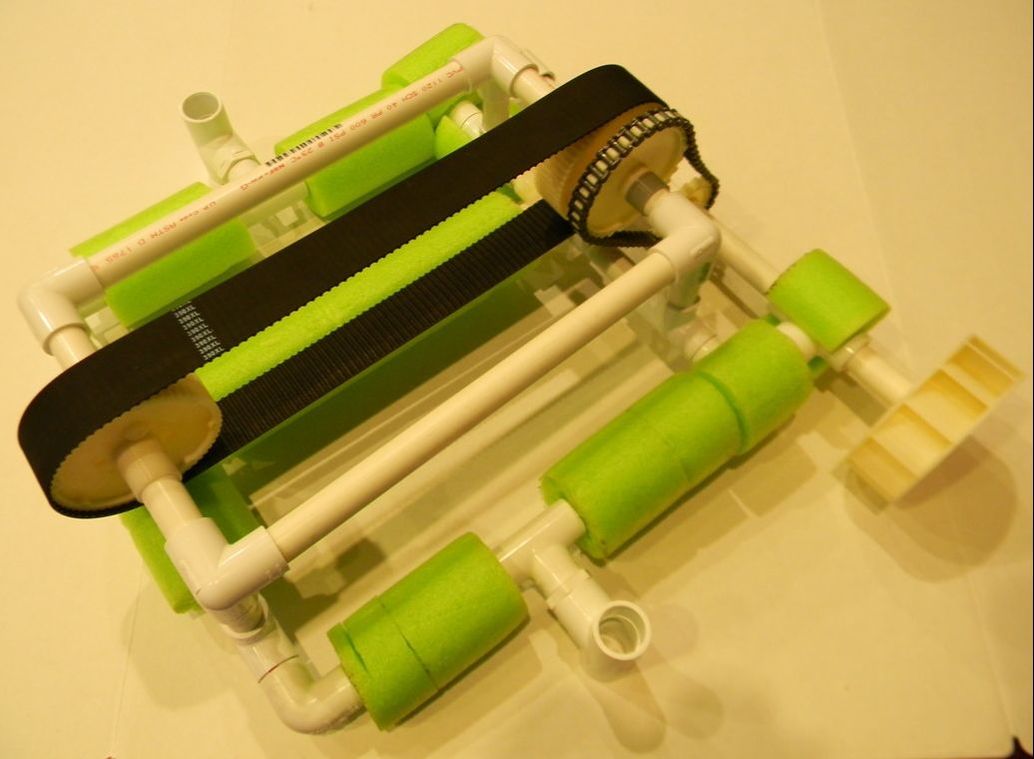
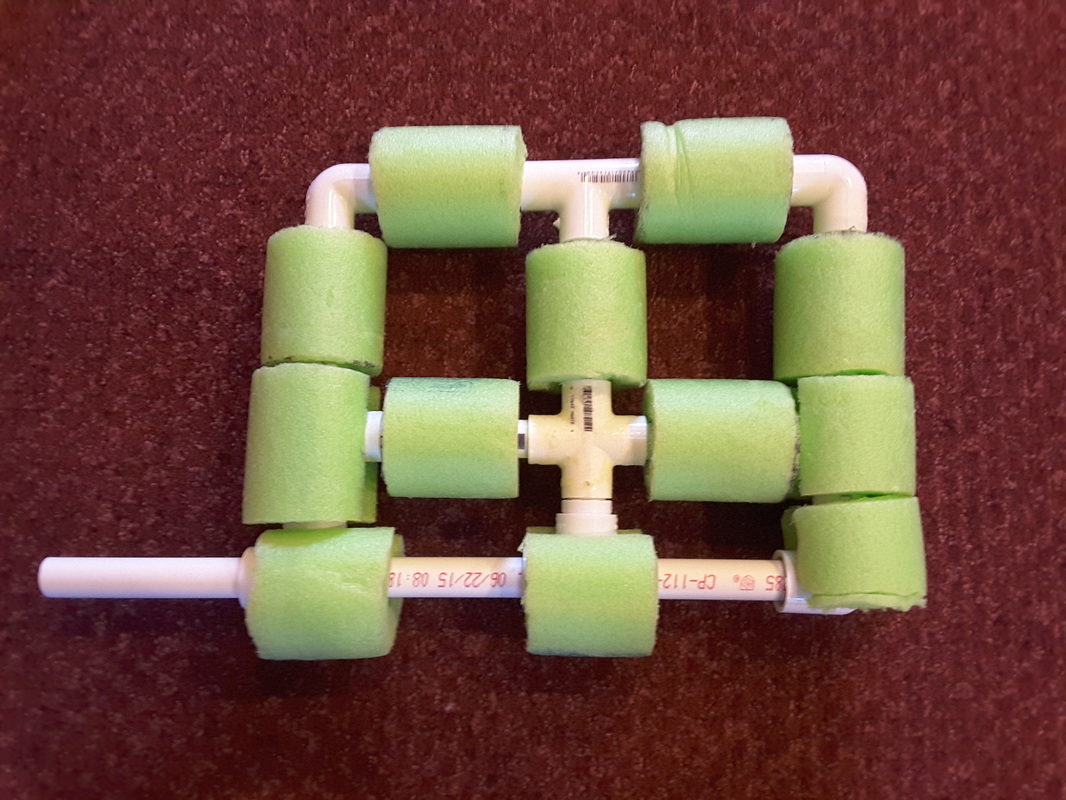
It was very windy and chilly today when we visited the Fish Hatchery to present the third version of our prototype and test it out. We met with Mrs. Kerstin Cody and Mr. Jake Osborne, who brought us to the shad pool and let us set up the FISH. Here is the prototype we brought: